Hệ thống phản hồi có nhiều ưu điểm so với các hệ thống thông thường. Nó giúp cải thiện mức tăng đầu ra của mạch và tăng đáp ứng tuyến tính của mạch. Nó cũng làm giảm nguy cơ biến dạng tín hiệu xảy ra chủ yếu do tín hiệu nhiễu.
Hệ thống phản hồi chủ yếu được sử dụng trong các mạch khuếch đại, hệ thống điều khiển dựa trên đầu ra và mạch dao động. Hệ thống phản hồi có hai loại: Tích cực phản hồi và Tiêu cực nhận xét. Bài viết này sẽ tập trung nhiều vào loại phản hồi sau.
Phác thảo nhanh:
- Hệ thống phản hồi tiêu cực trong điện tử là gì
- Mạch phản hồi tiêu cực
- Chức năng truyền phản hồi tiêu cực
- Phản hồi tiêu cực trong bộ khuếch đại hoạt động
- ví dụ 1
- Ví dụ 2
- Ví dụ 3
- Sự khác biệt giữa hệ thống phản hồi tích cực và tiêu cực
- Ứng dụng và tính chất của hệ thống phản hồi tiêu cực
- Ảnh hưởng của phản hồi tiêu cực đến băng thông
- Phần kết luận
Hệ thống phản hồi tiêu cực trong điện tử là gì
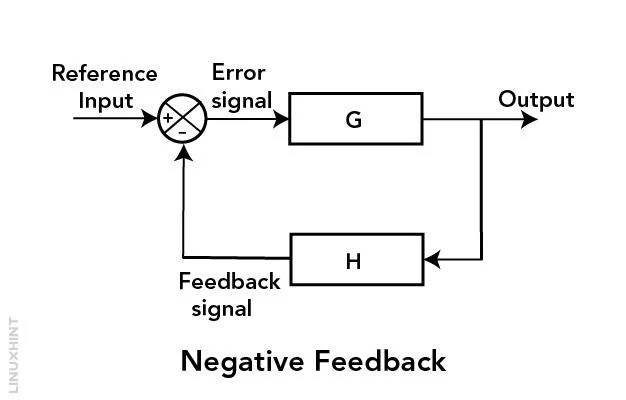
Phản hồi âm trong mạch điện là cơ chế điều khiển giúp ổn định và điều chỉnh hoạt động của mạch điện. Các mạch có hệ thống phản hồi âm tích hợp lấy tín hiệu đầu ra và đưa nó đến đầu vào dưới dạng tín hiệu đối lập pha (đảo ngược) . Hệ thống phản hồi này làm giảm bất kỳ sai lệch hoặc lỗi nào trong tín hiệu đầu ra.
Phản hồi tiêu cực cũng được gọi là phản hồi thoái hóa . Trong phản hồi âm, tín hiệu đầu ra đến dưới dạng phản hồi sẽ bị trừ khỏi tín hiệu tham chiếu đầu vào. Kết quả đầu ra gây ra một lỗi được gọi là đạt được phản hồi . Tín hiệu lỗi này được tạo ra sau khi trừ sẽ sửa đổi phản hồi của hệ thống tương ứng. Nếu mức tăng của hệ thống là dương thì tín hiệu phản hồi đến từ đầu ra phải được trừ khỏi tín hiệu tham chiếu đầu vào để duy trì phản hồi ở mức âm.
Khi có phản hồi tiêu cực trừ đi từ đầu vào tham chiếu, nó làm cho hệ thống ổn định hơn. Giả sử có một hệ thống thể hiện hành vi bất thường—để chống lại sự thay đổi này, hệ thống sẽ tạo ra tín hiệu đầu ra. Tín hiệu đầu ra hoặc tín hiệu phản hồi này chống lại tín hiệu đầu vào—sửa đổi đầu vào phù hợp để làm cho toàn bộ hệ thống hoạt động hiệu quả.
Mạch phản hồi tiêu cực
Mạch phản hồi tiêu cực được minh họa trong hình dưới đây. Ở đây bạn có thể thấy tín hiệu đầu ra được đưa trở lại phía đầu vào dưới dạng phản hồi. Ở phía đầu vào, sự khác biệt giữa tín hiệu tham chiếu và tín hiệu phản hồi được tạo ra, sau đó sẽ thúc đẩy hệ thống đi xa hơn.
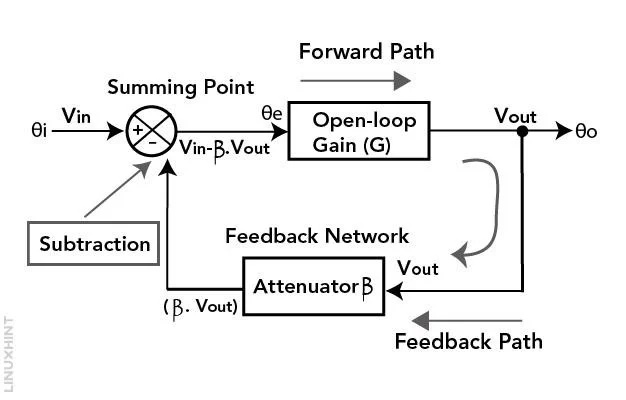
1. Linh kiện : Mạch gồm 2 thành phần chính:
- Một bộ khuếch đại có độ lợi G.
- Một vòng phản hồi có hệ số phản hồi β.
Tín hiệu đầu vào là V TRONG và đầu ra của bộ khuếch đại là V ngoài .
2. Ngã ba tổng hợp : Ở đầu vào của bộ khuếch đại có một tiếp điểm tổng (thường được biểu thị bằng hình tròn có dấu trừ bên trong). Điểm nối này sẽ trừ tín hiệu phản hồi khỏi đầu vào tham chiếu. Phần bị trừ là tích của hệ số phản hồi β và Vout đầu ra—nên tín hiệu lỗi là V TRONG – bV ngoài .
3. Vòng phản hồi : Tín hiệu lỗi này (V TRONG – bV ngoài ) là cái điều khiển hệ thống. Nó thể hiện sự khác biệt giữa đầu vào mong muốn V TRONG và sản lượng thực tế V ngoài được chia tỷ lệ theo hệ số phản hồi β.
4. Phản hồi tiêu cực : Khái niệm chính ở đây là phản hồi tiêu cực. Khi đầu ra V ngoài thay đổi do bất kỳ nhiễu loạn hoặc thay đổi nào trong đầu vào V TRONG tín hiệu lỗi (Vin – βV ngoài ) được tạo ra. Tín hiệu sai số tính toán sẽ được khuếch đại bởi bộ khuếch đại có độ lợi G và đưa trở lại đường giao nhau tổng. Điều quan trọng là phản hồi này mang tính âm vì nó bị trừ khỏi đầu vào.
- Nếu V ngoài tăng (tức là đầu ra của hệ thống cao hơn mức mong muốn) phản hồi làm giảm lỗi mang lại V ngoài quay trở lại giá trị mong muốn.
- Nếu V ngoài giảm (tức là đầu ra của hệ thống thấp hơn mong muốn) phản hồi làm tăng lỗi dẫn đến V ngoài sao lưu về phía giá trị mong muốn.
5. Phương trình phản hồi chung : Phương trình phản hồi tổng quát cho hệ thống này thường được biểu diễn dưới dạng

Phương trình này liên quan đến đầu ra V ngoài đến đầu vào Vin và hệ số phản hồi β thông qua bộ khuếch đại G. Nó cho thấy cách hệ thống sử dụng phản hồi âm để điều chỉnh và kiểm soát đầu ra sao cho phù hợp với đầu vào mong muốn.
Chức năng truyền phản hồi tiêu cực
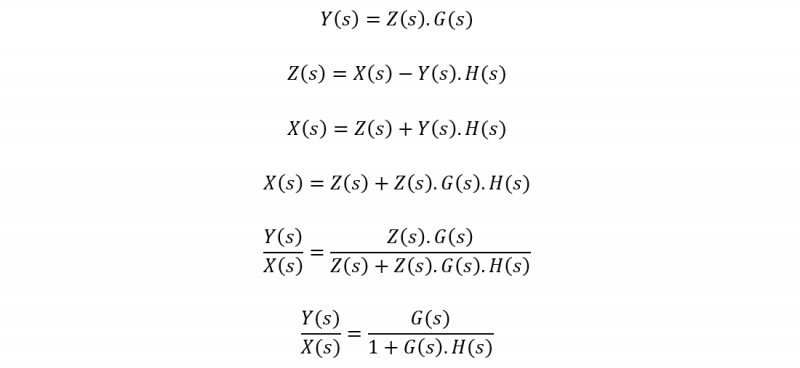
Hàm truyền xác định một phương trình biểu thị mối quan hệ giữa cả đầu vào và đầu ra. Nó cho chúng ta biết những thay đổi ở đầu vào ảnh hưởng đến đầu ra như thế nào. Trong phản hồi âm, chúng ta có tín hiệu trung gian được biểu thị bằng Z. Tín hiệu trung gian này thể hiện sự khác biệt giữa đầu ra và đầu vào.
Cho hàm truyền phương trình phản hồi âm, Z được sử dụng để tính toán tín hiệu lỗi hoặc hiệu chỉnh cần thiết để đưa hệ thống đến gần hơn với giá trị đầu ra mong muốn.
Sơ đồ khối sau đây cho thấy hệ thống phản hồi tiêu cực. Sử dụng sơ đồ này, chúng ta có thể tính hàm truyền cho hệ thống phản hồi âm:
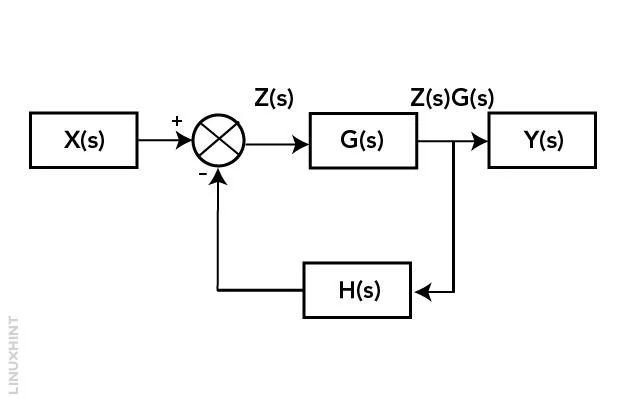
Đầu ra của hệ thống phản hồi tiêu cực bằng Y(s):
Phản hồi tiêu cực trong bộ khuếch đại hoạt động
Trong cấu hình phản hồi âm, một phần đầu ra (V) của op-amp được cấp cho cực đảo ngược đầu vào (-). Tín hiệu đầu ra này sẽ được trừ khỏi tham chiếu đầu vào. Nó giúp kiểm soát và ổn định mức tăng của bộ khuếch đại.
Bằng cách sử dụng phản hồi âm trong mạch op-amp, bạn có thể đặt mức khuếch đại mong muốn trong khi vẫn duy trì sự ổn định của hệ thống. Phản hồi tiêu cực làm giảm sự phi tuyến tính trong các đặc tính của op-amp, khiến nó hoạt động gần hơn với hành vi lý tưởng.
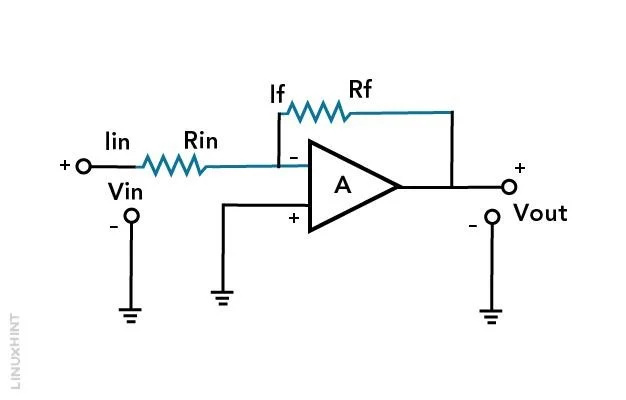
Mạch khuếch đại hoạt động phản hồi âm (op-amp) được thiết kế bằng cách sử dụng op-amp làm thành phần trung tâm. Một op-amp có hai đầu vào: một đầu vào đảo ngược (-) và đầu vào còn lại không đảo (+). Nó có một thiết bị đầu cuối đầu ra. Đối với hệ thống phản hồi tiêu cực, chúng tôi sẽ sử dụng mặt đảo ngược của op-amps.
Mạch này thường bao gồm:
- Điện trở đầu vào (Rin) kết nối nguồn đơn với đầu vào đảo ngược (-) của op-amp.
- Điện trở phản hồi (Rf) kết nối đầu ra của op-amp với đầu vào đảo ngược (-).
- Kết nối với tải ở đầu ra của op-amp.
Bạn có thể tìm thấy mức tăng bằng cách sử dụng tỷ lệ Rf trên Rin. Phản hồi tiêu cực này giúp ổn định và kiểm soát hoạt động của op-amp. Nó hoạt động bằng cách giảm thiểu sự chênh lệch điện áp giữa hai đầu vào đảo ngược và không đảo ngược. Nó tạo ra một mạch ngắn ảo giữa chúng. Kết quả là, op-amp điều chỉnh điện áp đầu ra của nó để duy trì sự cân bằng này—làm cho nó trở thành một bộ khuếch đại hiệu quả với mức khuếch đại được kiểm soát.
Ví dụ 1: Tính mức tăng vòng kín
Một hệ thống có mức tăng 60 dB khi không có phản hồi. Tỷ lệ phản hồi âm là 1/20, tìm mức tăng vòng kín (tính bằng dB) khi cộng thêm phản hồi âm.
Giải pháp:
Độ lợi vòng kín có phản hồi âm được tính theo công thức:

Trong trường hợp này, mức tăng vòng hở là 60 dB và tỷ lệ phản hồi là 1/20.

Vì vậy, với tỷ lệ phản hồi là 1/20, mức tăng vòng kín của hệ thống sẽ là 86,02 dB.
Ví dụ 2: Tính mức tăng điện áp
Nếu bộ khuếch đại ban đầu có mức tăng điện áp là 3000 (không có phản hồi) và sau đó bao gồm phản hồi điện áp âm với tỷ lệ phản hồi là mv = 0,01. Mức tăng điện áp mới của bộ khuếch đại sẽ là bao nhiêu?
Giải pháp :
Bạn có thể sử dụng công thức tăng điện áp cho bộ khuếch đại có phản hồi điện áp âm—để tính mức tăng điện áp của bộ khuếch đại:

Trong công thức trên:
MỘT f = Tăng điện áp có phản hồi
MỘT = Tăng điện áp không có phản hồi
mv = Tỷ lệ phản hồi
Ở đây chúng tôi có:
Tăng điện áp mà không có phản hồi (MỘT) = 3000
Phần phản hồi (mv) = 0,01
Bây giờ, đặt các giá trị này vào công thức:
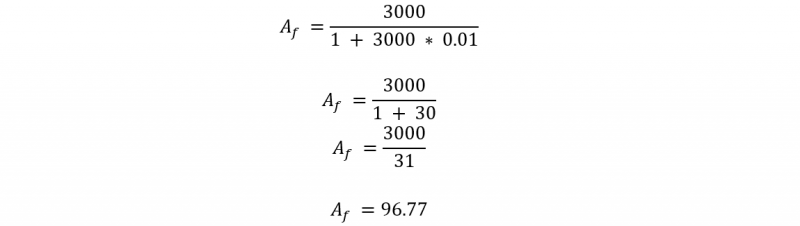
Vì vậy, mức tăng điện áp của bộ khuếch đại có phản hồi điện áp âm là khoảng 96,77.
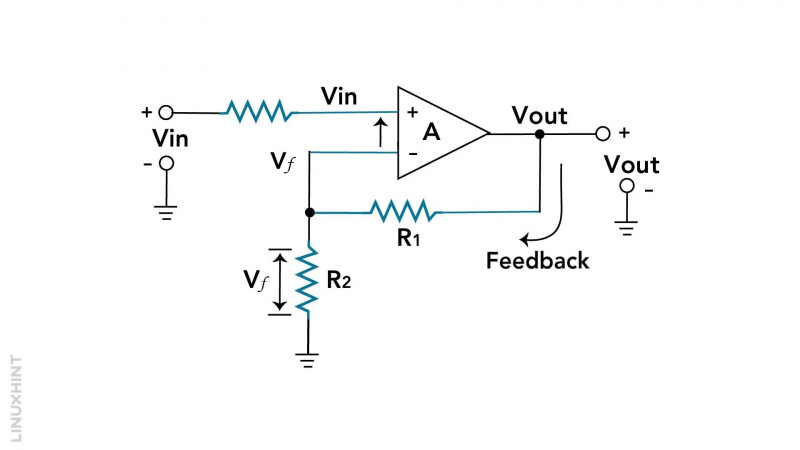
Ví dụ 3: Tính điện trở phản hồi
Xác định các giá trị thích hợp cho điện trở phản hồi, R 1 và R 2 . Bạn phải ổn định mạch khuếch đại không đảo bằng cách sử dụng bộ khuếch đại hoạt động có mức tăng điện áp vòng hở (AVOL) là 220.000. Mức tăng vòng kín được nhắm mục tiêu của bạn là 40.
Giải pháp :
Phương trình phản hồi vòng kín tổng quát là:

Để có được phần phản hồi β, hãy sắp xếp lại phương trình trên:
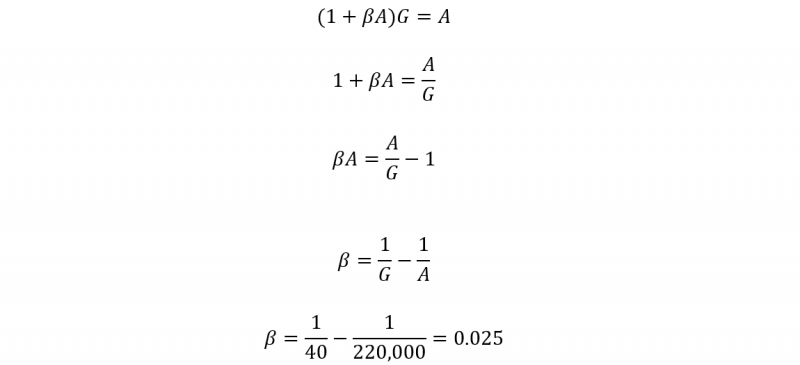
Trong trường hợp này, độ lợi vòng hở quá cao. Vì vậy, phần phản hồi β sẽ xấp xỉ bằng nghịch đảo của độ lợi vòng kín 1/G. Vì giá trị 1/A quá nhỏ, xấp xỉ bằng (0,025).
Các điện trở R1 và R2 trong cấu hình trên tạo thành mạch chia điện áp nối tiếp. Bạn có thể tìm thấy mức tăng điện áp vòng kín như sau:

Giả sử giá trị của R2 là 1000 Ω (1 kΩ). Khi đó giá trị của R 1 có thể được viết như
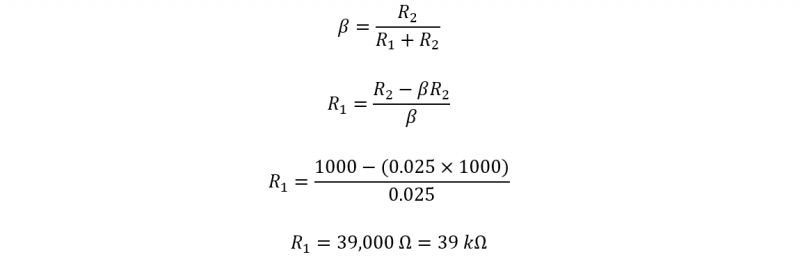
Vì vậy, đối với mạch khuếch đại không đảo có hệ số khuếch đại là 40, bạn cần chọn R 1 của 39 kΩ và R 2 là 1 kΩ.
Sự khác biệt giữa hệ thống phản hồi tích cực và tiêu cực
Bạn có thể tìm thấy sự khác biệt giữa hệ thống phản hồi tích cực và tiêu cực trong bảng dưới đây:
| Sự khác biệt về loại phản hồi | Phản hồi tích cực | Phản hồi tiêu cực |
|---|---|---|
| Sự định nghĩa | Trong phản hồi này, phản hồi tham chiếu và tín hiệu đầu vào được thêm vào. | Trong loại này, phản hồi đầu ra được trừ khỏi đầu vào tham chiếu. |
| Danh pháp | Phản hồi tích cực hoặc Phản hồi tái tạo. | Phản hồi tiêu cực hoặc phản hồi thoái hóa. |
| Mục đích | Khuếch đại hoặc tăng tín hiệu. | Ổn định hoặc điều chỉnh tín hiệu. |
| Hiệu ứng trên hệ thống | Có thể dẫn đến hành vi và dao động không thể đoán trước. | Thúc đẩy khả năng dự đoán và hoạt động ở trạng thái ổn định. |
| Đạt được hướng | Tăng độ lợi hệ thống. | Giảm độ lợi của hệ thống. |
| Cách sử dụng | Bộ khuếch đại âm thanh và bộ dao động thư giãn. | Bộ khuếch đại hoạt động (Op-Amps), hệ thống điều khiển phản hồi. |
| Sự ổn định | Thường dẫn đến sự mất ổn định. | Cải thiện sự ổn định của hệ thống. |
| Ví dụ | Schmitt kích hoạt và flip-flop. | Bộ khuếch đại điện áp và bộ điều khiển nhiệt độ. |
Ứng dụng và tính chất của hệ thống phản hồi tiêu cực
Hệ thống phản hồi tiêu cực có nhiều ứng dụng trong điện tử nói chung. Các hệ thống này đã cải thiện tính không ổn định của hệ thống, tính tuyến tính của hệ thống, đáp ứng tần số và đáp ứng bước. Do những lợi ích này của hệ thống phản hồi âm, nhiều mạch khuếch đại trên các thiết bị điện tử sở hữu hệ thống phản hồi âm.
Một số mô tả chi tiết về hệ thống phản hồi tiêu cực được đưa ra dưới đây:
Sự ổn định : Hệ thống phản hồi âm làm giảm độ lệch so với điểm mong muốn, mang lại hệ thống ổn định hơn. Ví dụ, bộ điều chỉnh nhiệt đảm bảo nhiệt độ vẫn gần với giá trị đã chọn.
Độ chính xác: Hệ thống phản hồi tiêu cực cải thiện độ chính xác của hệ thống bằng cách giảm thiểu lỗi. Trong mạch khuếch đại, phản hồi âm làm giảm độ méo và tạo ra tín hiệu ổn định hơn ở đầu ra.
Kiểm soát băng thông : Bạn cũng có thể kiểm soát băng thông của bộ khuếch đại với sự trợ giúp của hệ thống phản hồi âm. Điều này làm cho chúng phù hợp cho một số ứng dụng. Các ứng dụng này bao gồm khuếch đại âm thanh đến khuếch đại tần số vô tuyến.
Giảm tiếng ồn : Phản hồi tiêu cực có thể làm giảm tiếng ồn và nhiễu không mong muốn. Giảm tiếng ồn có nhiều ứng dụng trong lĩnh vực hệ thống âm thanh và thiết bị liên lạc.
Phản hồi động : Hệ thống phản hồi tiêu cực có khả năng phản hồi động. Các hệ thống này có thể điều chỉnh phù hợp với các điều kiện nhất định. Một ví dụ về phản ứng động bao gồm hệ thống kiểm soát hành trình ô tô.
Ảnh hưởng của phản hồi tiêu cực đến băng thông
Băng thông giải thích dải tần hoạt động của bộ khuếch đại có mức tăng không đổi. Hệ thống có băng thông cao hơn có nghĩa là bộ khuếch đại có thể xử lý nhiều tần số hơn. Phản hồi tiêu cực làm giảm mức tăng của bộ khuếch đại bằng cách đưa ra đầu ra ở phía đầu vào. Điều này cải thiện độ ổn định và tuyến tính của hệ thống, nhưng kết quả là cũng làm giảm độ lợi của hệ thống.
Các ảnh hưởng của phản hồi tiêu cực đến băng thông phụ thuộc vào loại và số lượng phản hồi được áp dụng. Nói chung, phản hồi tiêu cực làm tăng băng thông bằng cách giảm mức tăng của hệ thống. Tích băng thông khuếch đại, là thước đo hiệu suất của bộ khuếch đại, không đổi bất kể phản hồi.
Ví dụ , hãy xem xét một mạch khuếch đại không có phản hồi có mức tăng băng thông 100 và 10 kHz. Áp dụng phản hồi tiêu cực để giảm mức tăng xuống 10. Điều này sẽ tăng băng thông lên 100 kHz. Tích băng thông khuếch đại vẫn là 100 × 10 kHz = 1 MHz trong cả hai trường hợp.
Tuy nhiên, phản hồi tiêu cực cũng ảnh hưởng đến tần số cắt của bộ khuếch đại. Đây là các tần số mà mức tăng của hệ thống giảm từ giá trị tối đa. Phản hồi âm làm giảm tần số cắt và tăng tần số cắt trên. Điều này sẽ dẫn đến việc mở rộng đường cong đáp ứng tần số của bộ khuếch đại. Tác động thực sự của phản hồi tiêu cực lên băng thông là đánh đổi mức tăng để lấy băng thông.
Điều này có nghĩa là việc áp dụng phản hồi âm sẽ làm tăng dải tần số mà bộ khuếch đại có thể xử lý. Nhưng tất cả điều này đều phải trả giá bằng việc giảm hệ số khuếch đại của nó.
Phần kết luận
Hệ thống phản hồi tiêu cực có thể kiểm soát hoặc điều chỉnh đầu ra bằng cách phục vụ một phần đầu ra ở phía đầu vào. Phản hồi này tạo ra tín hiệu lỗi, tín hiệu này sẽ mang lại cho bạn một hệ thống ổn định hơn. Tín hiệu lỗi này là động và điều khiển toàn bộ hệ thống. Hệ thống phản hồi tiêu cực có thể cải thiện độ chính xác của hệ thống và cũng có thể kiểm soát băng thông. Hệ thống phản hồi này được sử dụng trong các mạch khuếch đại như hệ thống khử tiếng ồn hoặc hệ thống điều khiển hành trình trên ô tô. Đọc thêm về mô tả chi tiết về phản hồi tiêu cực trong bài viết này.